Fuzzy Studio and Fuzzy RTOS were officially launched one month ago. Our goal remains the same: to make robotics accessible to everyone. And to do that, there are not thousands of solutions. Simplicity, simplicity and simplicity. That’s why we have focused this update on a better user interface, to make the trajectory generation process even more logical, and to better identify – and therefore correct – problems that may occur.
A more user-friendly interface to improve navigation
Trajectory panel update
The trajectory panel is evolving to make trajectory generation clearer. Hide the preview, copy the trajectory, access the different generators and waypoints… All accesses are possible with a single click.
Note: it is also possible to double click on the trajectory name to access the generators directly.

Trajectory player update
Trajectory panel information now appears more clearly with an enlarged banner. The cycle times are easier to read, and the override speed is easier to manipulate. Also, when dragging the trajectory from the player, it is possible to see the current speed at each moment of the trajectory.

New Trajectory Generation parameters panel
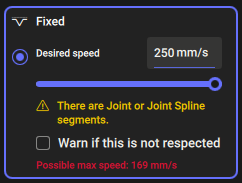
The parameters that define how a trajectory is generated have been revised to make them easier to read and select. Select between Optimized or Fixed speed for your trajectory generation, and set your speed limits according to your application specifications.
Note: The Auto Generation button is always checked, but can be unchecked at any time.

Burger menu with keyboard shortcuts
To make the interface easier to read and give more space to the 3D scene, the menus that were previously in the banner are now in the burger menu, with keyboard shortcuts available for basic functions such as opening a new project, saving, exporting… A close function has also been added to return directly to the Fuzzy Studio start screen.
View cube for quick scene manipulation
Manipulating a 3D scene is not easy for most users. In order to switch to a precise point of view (top, front, side…), the scene manipulation cube allows you to easily change the camera positioning to validate your projects even faster, with a centering made on the robot (natively placed in the heart of the scene).

Planar interaction to gizmo to lock movements
Cobots have democratized the ability to move in a single plane. Fuzzy now offers a similar feature that allows you to move your robot, TCP or any other object in the scene in an XY, YZ or XZ plane directly from the manipulation gizmo.

Precompute thumbnails when importing any asset
Previously, when importing a new object (tool or robot) into Fuzzy Studio, it was mandatory to provide an image of the asset to validate the import. It’s no longer necessary, as an image built from the CAD model can be generated in-app to illustrate your newly imported asset.

Faster debugging in trajectory generation
Show problematic waypoint index in pop-up window
A pop-up window will appear immediately during trajectory generation (with the automatic generation option enabled) if a problem prevents correct execution, highlighting the waypoint in the trajectory where the issue comes from. This facilitates debugging by quickly accessing the problem.

Warn the user that constant speed only works on cartesian paths
Industrial Robotics does not physically allow the use of a fixed speed for Joint type motions. If you select this type of motion with fixed speed path generation, a warning message will alert you to the inability to generate such a path and prompt you to make the necessary changes.
Dotted line previews the path between the current point and a new desired position for a waypoint
When Auto Generation is enabled, you will now see dotted lines appear as you change the position of a waypoint from its initial position to its new position, dynamically representing the proposed new path for your robot.
RTOS always safer
In order to ensure the safe operation of your robot, we make our RTOS better every day. We first disable jogging after 5 seconds of user inactivity. This helps to prevent accidents caused by unintended movements of the robot due to inactivity or unintentional commands. We also add safe braking strategy in place in the event that the final computed robot target is invalid. This can help prevent collisions or other dangerous situations from occurring. Finally, it is also important to avoid canceling the generation of a requested trajectory due to input/output (IO) issues. This ensures that the robot continues to function as intended, even if there are minor issues with the input or output systems.
Did you find this article interesting?
Share this release on your social media
